|
PROJECTS PROF. SOCIETIES,
|
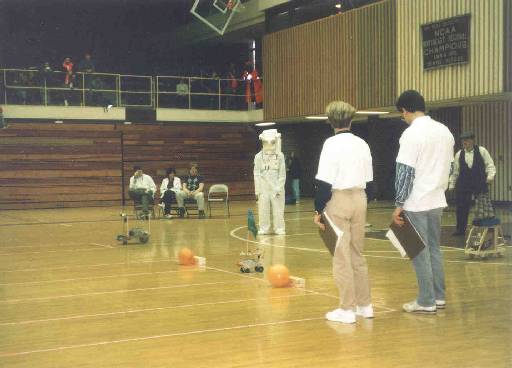
Early in my junior year of high school, a few of my friends heard about an inter-scholastic competition called Odyssey of the Mind. The competition is divided into 4 levels of teams--grade school, middle schooll, high school, and college--each of which may compete in any one of five problems. Each year's problems change, but the fields remain the consistent: acting, vehicular, weight holder, and the like. Budding engineers that we were, we chose the "Hybrid Relay" vehicle problem. In addition to the "main" problem at each level, a random "spontaneous" problem must also be soved at each competition. This spontaneous problem accounted for 10-20% of the final score. The "Hybrid Relay" problem required the carrying of a small pennant through five legs of a course by different vehicles within the 8-minute time allotted. Each leg must be completed by a different vehicle, "powered" by one of the following methods: mechanical, electrical, pneumatic, vibrational, with no method not used. The fifth vehicle must climb a shallow set of stairs at the end of its leg. At the end of each leg is a balloon which must be popped. Below are pictures of the right and left sides of the course at the MA state finals at Worcester Polytechnic Institute. These were taken near the beginning of the run, and very nearly everything is set up for execution of our solution to the problem.
Points are awarded for completing legs, popping balloons, unifying theme, teamwork, et cetera. For techical solutions and accomplishments, 200 points could be earned. For style and theme, 50 points could be earned. In addition, there was a whole column of penalties which could be incurred, none of which we ever did. That academic year, my friends and I spent several hundred hours planning, building, refining, and practicing our problem solution. Most of this time was afternoons at school and weekends in our coach/mentor's basement workshop. The work paid off in five well designed and implemented vehicles. (All of this was accomplished for less than $90 in materials.) In course/run order, they were: 1) mechanical - powered by an old Victrola drive mechanism Our theme was Expanding Horizons: Shattering the Boundaries of Our World. Each vehicle had a diorama which matched (as closely as possible) its propulsion method. Each team member was costumed to the time period of the advance in transportation he represented and acted out his piece to an appropriate sound bite. In vehicle order they were: Step) diorama - costume - theme music
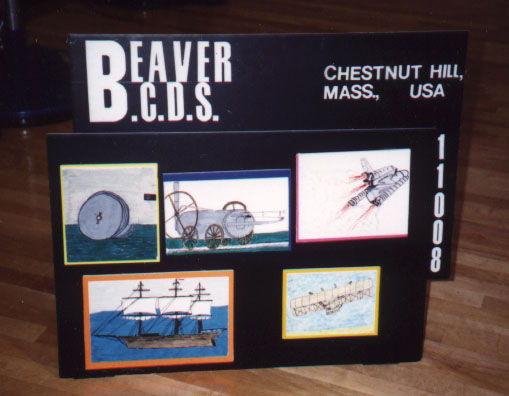
Our team billboard (above) catalogs the vehicles used to support our theme. Close-up photos (with and without dioramas) and brief descriptions of each vehicle are below, with some of the unusual challenges and issues we encountered. The mechanical and electrical cars were the easiest (we presumed correctly) to do, so we started them first. The mechnical car--the first leg--started with a polycarbonate chassis and then a Victrola wind-up mechanism was mounted atop the chassis. The Victrola has such a high torque output that we needed to put large wheels on the unit to prevent the unit from peeling out. :-) Despite the eight-inch diameter wheels, the car would easily reach ~15mph by the end of the 20-foot track. All this momentum drove it right through the target mount, and required that a team member "catch" it to avoid injury or damage to others. [The elctrical vehicle is discussed in its sequence--leg four.]
On a sidenote, this vehicle had a gentle arc to its travel. This very predictable characteristic prompted one of our team members to create "sighting tubes" mounted to the chassis of each vehicle, beneath the dioramas. This clever adaptation allowed us to be concerned with consistency in performance, and not worry about travelling in a nearly straight line! For the second vehicle [and leg of the relay], we interpreted "vibration" as an "oscillation", but at a much lower frequency than most people would expect. (Our vehicle drive mechanism vibrated at about 1/4 Hz.) This vehicle required quite a bit more planning, since making changes on the fly to the more complicated and intricate mechanics would not be feasible. Our design was a peg in a rotating wheel which drove a sliding bar back and forth within the vehicle's frame. Attached to the bottom of the slider was a hinged foot. This foot would drive the vehicle forward when the slider was pushed to the rear of the vehicle, and would kick freely when it was pulled to the front of the vehicle. We wanted to put a slider on each side of the drive wheel so it would have two "feet" and appear to walk, but it would have been far too complicated for our time and expertise.
The pneumatic vehicle was the third leg, and consisted of a simple balsa wood frame to hold the battery pack, motor, and wheels together. This elegant solution was probably the most compact vehicle design implemented at any of our competitions that year. Attached to the motor shaft was a model airplane propeller, providing the air propulsion.
The fourth, electrical car (built early on) is essentially a "Big Wheel"-like tricycle. The motor has a small wheel on its shaft, and this is held against the large drive wheel by a spring. This produces a drive ratio of about 20:1. No torque or power worries here, either. In the diorama atop the vehicle, we can see Orville Wright at work on the shop floor.
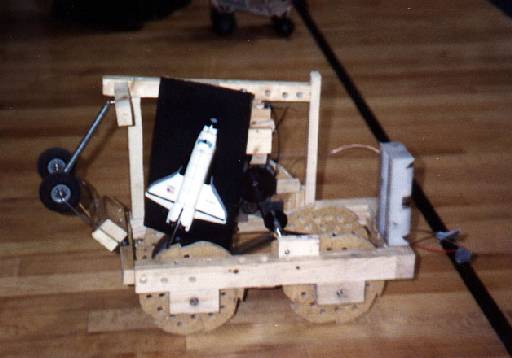
The last vehicle was the stair climber. Our first version (shown below, with a poor version of its final diorama) was quite heavy and cumbersome, being under-powered and made of wood. At our first competition, we were still working on it, so we brought a mobile workshop with us to our preparation room! That morning we drilled the wheels full of holes and made other weight-saving modifications. It still didn't make it up the three steps at the end of its course leg at the regional competition, but it was redesigned and completely rebuilt by the MA state competition.
The second and final version of the stair climber (shown above) had independantly driven axles. The front wheels were fast and low torque to lift the front up each step, and the rear wheels were slow and low for drive and lifting the ~15lb vehicle up each step. All wheels were saw-toothed to grab the edge of each step. The new design worked well on stairs, but the wheels rotating at different speeds would cause the vehicle to slide around on slipperly floors. To make the vehicle steerable/ predictable, we carried over an idea from the first incarnation and installed a hinged wheel which would prop the front wheels up off the ground, creating a tricycle arrangement. When the front wheels went up the frist step, the undercarraige wheel would flop away uselessly. Now driven by the slow but powerful rear wheels, this vehicle was agonizingly slow, taking over a minute to go the 16 feet to the bottom of the stairs. Once it started up the stairs, though, there was never any doubt in any spectator's or competitor's mind that this vehicle was going all the way to the top!
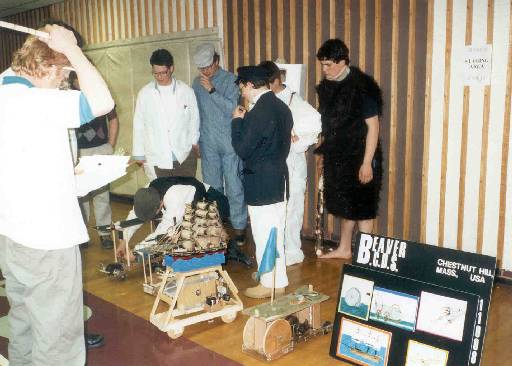
Below is our team prepping for the MA state finals at WPI. Most of us and the vehicles are visible in this group shot.
Our drive, tenacity, intellectual curiosity and originality drove us to the top that year. We swept through the regional and MA state finals, beating all other teams, including those in the collegiate division! We possesed a very well-developed and integrated main-problem solution, which allowed us more time to practice our weaker "spontaneous problem" solving abilities during the lower levels of competition. At the OM World Finals in 1992 in Boulder, Colorado, we came in 4th overall (darn that spontaneous problem). Our consolation was that we had easily scored the highest--and almost nearly perfect--on the main problem solution. Well done, guys!
My friends and I learned quite a bit about ourselves, about each other, and about working together that year. Teamwork, brainstorming, conflict resolution, patience, appreciation of others, and strength/weakness identification and optomization were the skills we developed most during those long hours, days and weeks. I would do it all over again, twice.
|
|
| Best viewed at 1280 x 1024. | This page was last updated on 22Dec05. |